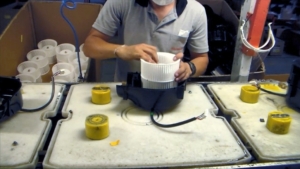
Use case 5 presents a great example of how human workers and robots will collaborate efficiently and support one another in future factories. The assembly of a kitchen hood at Silverline entails multiple steps that require distinct movements and skills, which are currently all performed by workers. Effective human-robot collaboration will lessen the physical burden on the worker, reduce errors, and increase efficiency of the process and thus production capacity.
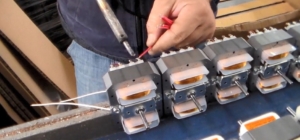
Cables need to be identified by colour or dimension to ensure correct and safe connections, and various other components need to be identified, moved, and placed with precision. As these actions are highly repetitive, and some components need to be moved around, the work is physically and mentally tiring, which increases the risk of mistakes. Effective human-robot collaboration will reduce the worker’s risk of injury and accelerate production.
The demonstration of the UC 5 faced different difficulties within its life, such as;
- Individualization of the workpiece: the working area lighting, the different color of work pieces as well as the color of the fixtures affected whether the cameras saw the correct position of the workpiece. Therefore, the effort moved in the direction of changing the colors of work pieces (e.g. using white and grey for plastic parts instead of black one as well as using light colored cables) and fixtures and the lighting positions on the working area.
- Grasping Work piece: grasping the cables and plastic pieces was a challenge. In particular, finding the right position to grasp and hold the work piece and then moving it to the final working position without loosing the position of the work piece. Silverline, as APRIL partners, spent a lot of time finding the correct position for grasping. However, moving the work piece to the assembling (or the soldering) position without loosing it also caused a little some problems.
- Repeatability: that was another challenge as the workpiece position changed each time and on each . In particular, the cables were always in different positions on the tray. Therefore, APRIL system had to detect the actual position of work piece for the soldering process, correctly grasp and move it and position it in the correct position on the electrical engine. Meanwhile, changing the position of the work piece after grasping was another challenge for plastic parts. As a result, moving and positioning the work piece on the semi-finished product created repeatability problems.
- Reaching the exact position of the work piece on the pallet: as mentioned regarding Repeatability, moving the work piece and positioning it on the pallet created some problems during the integration stage.
System speed: for use in the industrial field, the actual detection time and system movement are low. However, Silverline saw that it would be beneficial to develop the system according to the speed adapted to the assembly line.
Approximately 75 people attended the Silverline Demonstration. There were about 25 people from industrial companies such as meat production companies, textile companies, plastic parts manufacturing companies, and all their activities are around the Silverline area. Some of them are from Amasya University, like professors from the faculty of engineering and university researchers, and the rest are all our operators working on assembly lines with similar rules of the APRIL system.
In order to increase the participants’ engagement, Silverline used 2 different types of questionnaires: one for their operators and the other one for the other visitors.
For the operators, hard copies were prepared, in Turkish language, to do the survey on-site.
For the others, were prepared the survey, in Turkish language, by Microsoft Forms and have sent it to them by e-mail.
The results of the questionnaires are as follows.
Below, find some photos representing how the task is done currently.